Industrirobotter får ekstra sikkerhed med Computer Vision-baseret positioneringssystem
Når mennesker og industrirobotter bevæger sig rundt blandt hinanden, så er der brug for høj sikkerhed, for at undgå ulykker. Sikkerhed har derfor været en vigtig del af et AAU-ledet forskningsprojekt, der helt overordnet drejer som om at udbrede brugen af robotter i produktionsmiljøer. Med Professor Preben Mogensen i spidsen for projektet, er der nu implementeret et ekstra sikkerhedssystem udviklet af Ambolt AI.
Meningen er at robotterne skal køre pænt, når der er mennesker i deres arbejdsområde. Når der er mennesketomt, så kan farten sættes op. Hermed kan effektiviteten øges, men det skal ske uden at sikkerheden kompromitteres. Systemet indeholder derfor to separate positioneringssystemer for at have den ekstra høje sikkerhed.
Som primært system skal alle personer bære en radiotag i produktionsområdet. Glemmes det at tage en radiotag med, eller bliver den ikke ordentligt læst, så slår back-up sikkerhedssystemet fra Ambolt AI til.
Kun positionen bliver gemt
Back-up sikkerhedssystemet er baseret på Computer Vision med kamera løsninger. Systemet er trænet til at kunne genkende mennesker, men der gemmes ikke billeder af mennesker. Kun positionen bliver gemt, og kun så længe positionen er i arbejdsområdet. Der gemmes således ingen personfølsomme oplysninger.
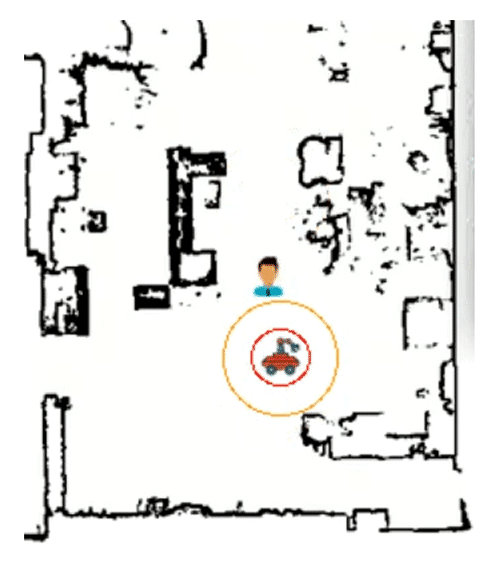
For at finde personer i arbejdsområdet bruger vi en objektdetektor, der er trænet til at finde mennesker. Når først en person er opdaget, antager vi, at bunden af afgrænsningsboksen er der, hvor deres fødder rører gulvet og dermed er gyldig til positionering.
Deres position overføres til koordinater, og vi sammenligner vores resultater med det primære system. Hvis både det primære og det sekundære system finder en person på samme sted, er alt godt. I tilfælde af at det sekundære system finder en person, der ikke er opdaget af det primære system, skal en alarm igangsætte en handling.